

2024年
2月
1日
VR徘徊(5) StereoPi V1でROSを動かす
メモリが足りない
ロボット

mayumi
「raspberrypiからルンバを操作する(3)」の続きです。無事raspberrypiの電源もルンバからとれるようになり、raspberry piからのルンバも操作できるようになりました。あとは、ジャンパーコードがピロピロでているのが気になるのでそのあたりを変えたいと思います。
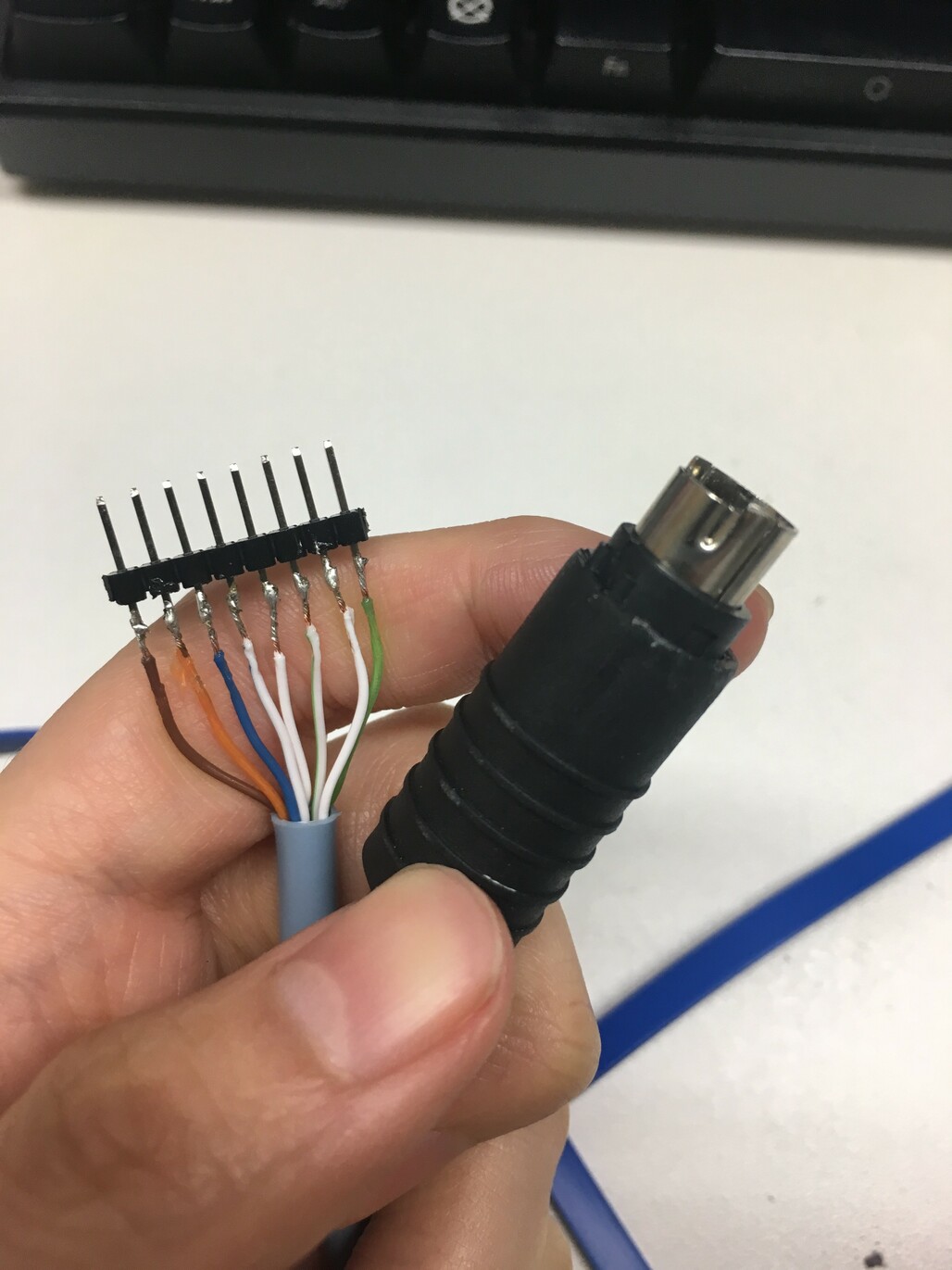
ルンバと直接接続している部分をDINプラグ(7ピン)に変えます。線の部分にはLANケーブルをカットして使用しました。
最終的にはこんな感じになります。
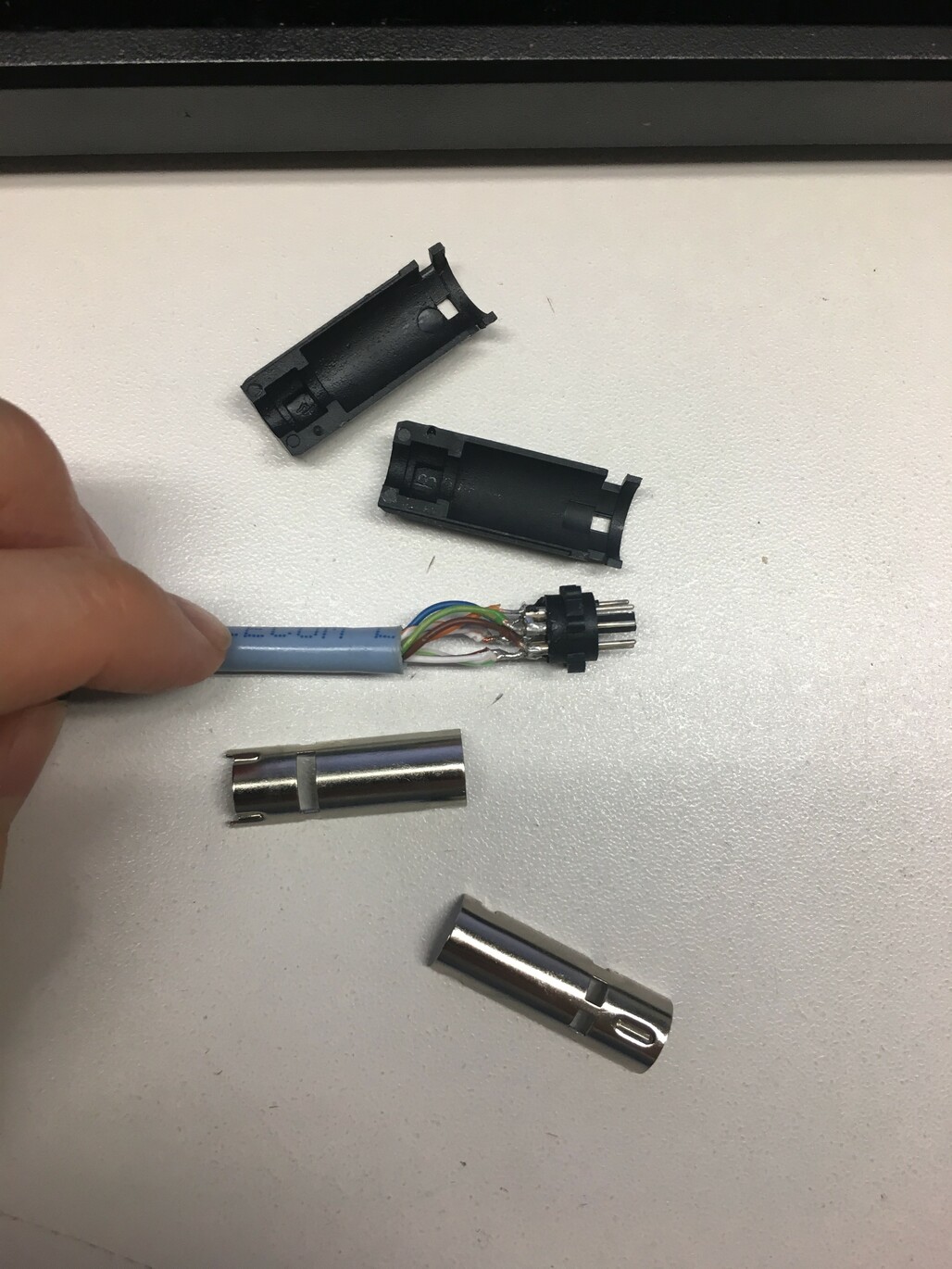
DINプラグ側
DINプラグを解体して、ルンバオープンインタフェースの資料を参考にはんだ付けします。
iRobot® Roomba 500 Open Interface (OI) Specification
ここでは、LANケーブルの線とコネクタを表のとおりに接続しました。LANケーブルの中は8本あるので余った白線はGNDに二本捩って接続しています。
| ルンバ側(DINコネクタ) | LANケーブル |
|---|---|
| 1 電源 | 緑 |
| 2 電源 | 接続しない |
| 3 RXD | オレンジ |
| 4 TXD | 茶 |
| 5 BRC | 青 |
| 6 GND | 白 |
| 7 GND | 白 |
DINプラグは少し固いですが、ぐっと引っ張ると外側が取れます。
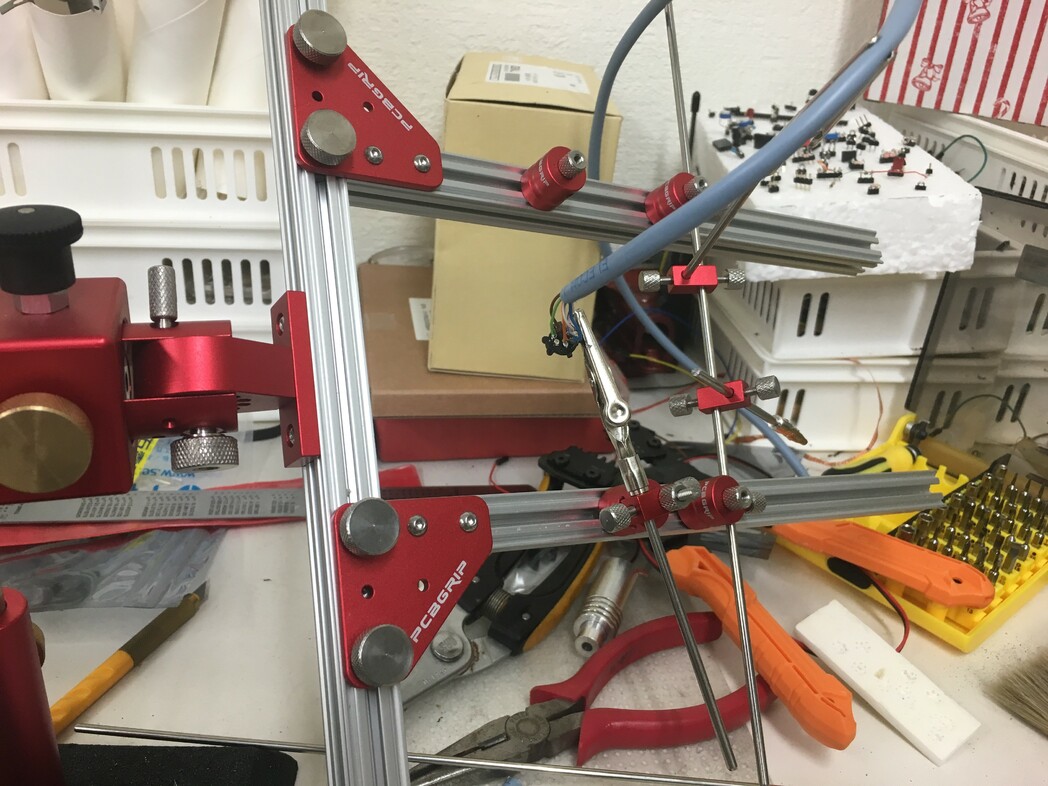
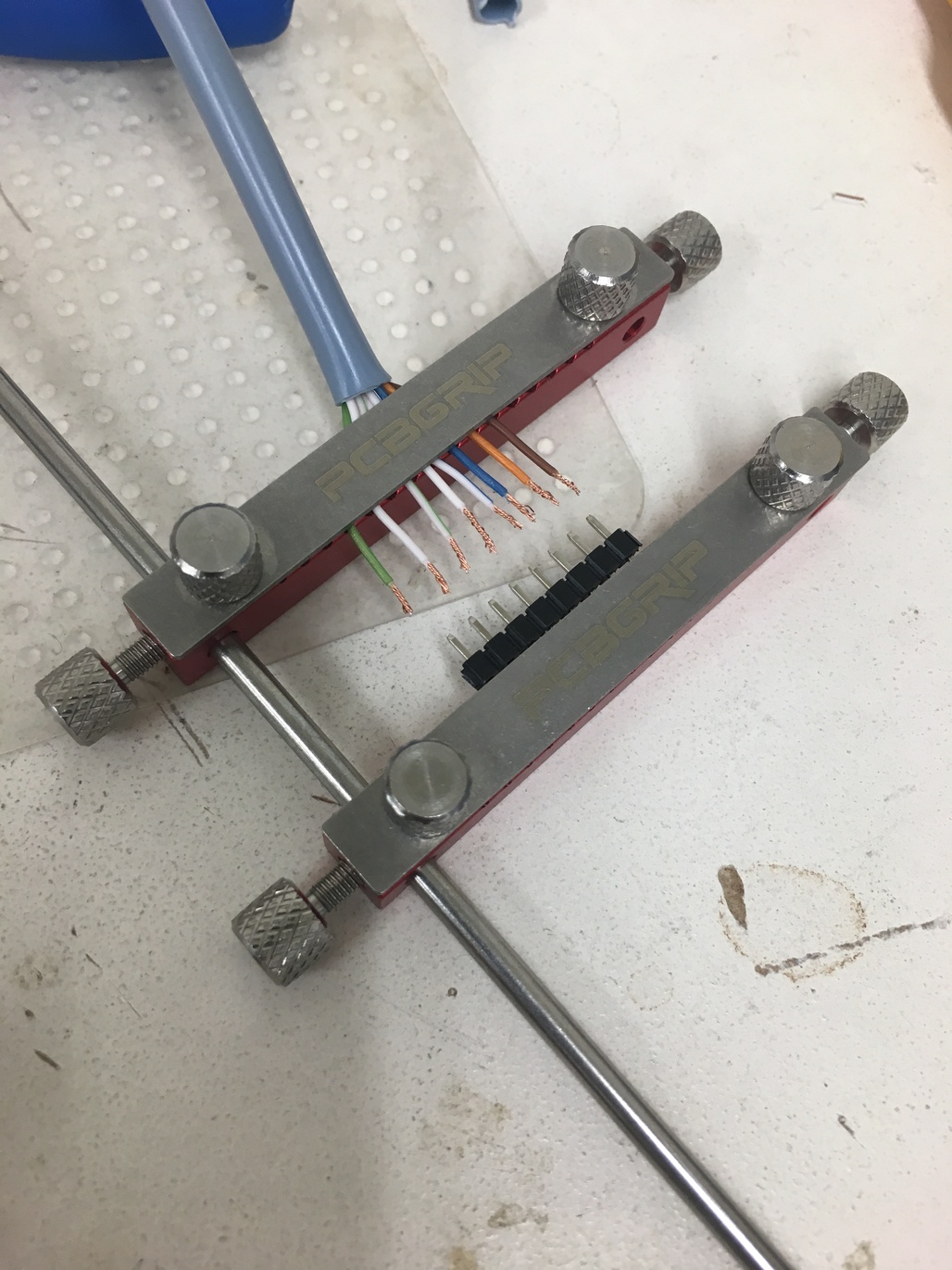
DINコネクタとLANケーブルも、LANケーブルとピンヘッダも簡単にははんだ付けできないので、いろいろと道具に頼りつつなんとか接続しました。
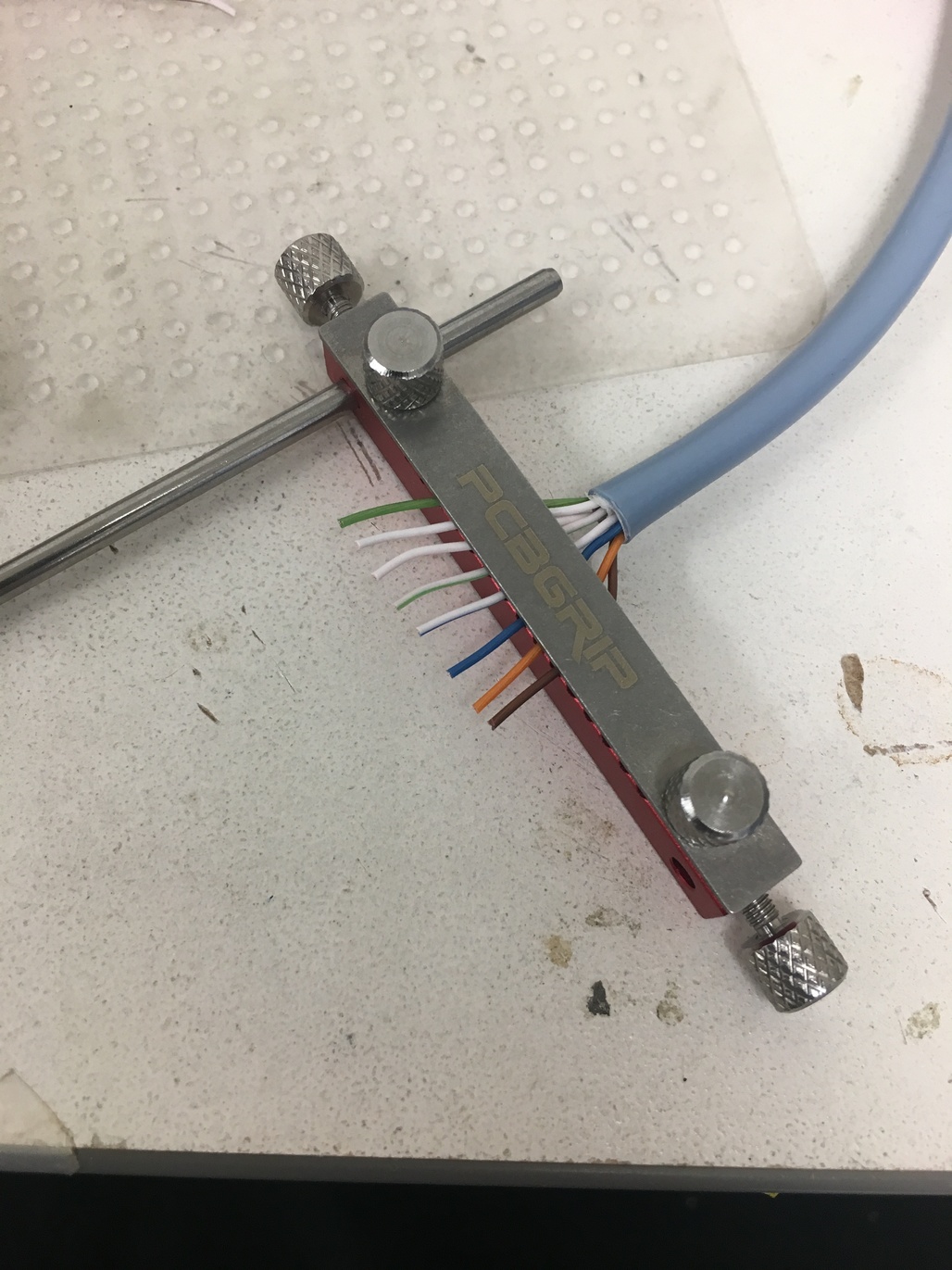
この使い方が画期的かはわからないけど、PCGGRIPさんには第三、第四の手として下手くそな自分をかなりサポートしていただきました。
ピンヘッダ側
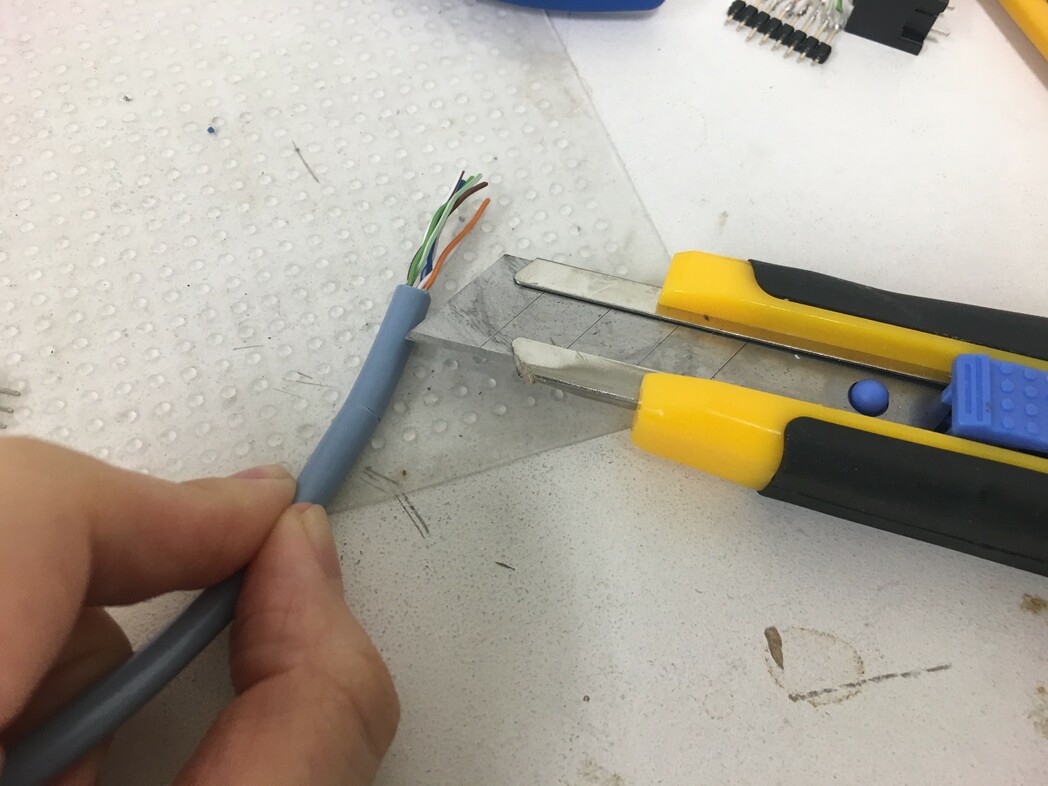
LANケーブルに切り込みを入れて外側のビニールを外します。後から適切な線の長さに整えたり、グネグネした状態の線をまっすぐにするために、必要より長めにビニールに切り込みを入れて外します。
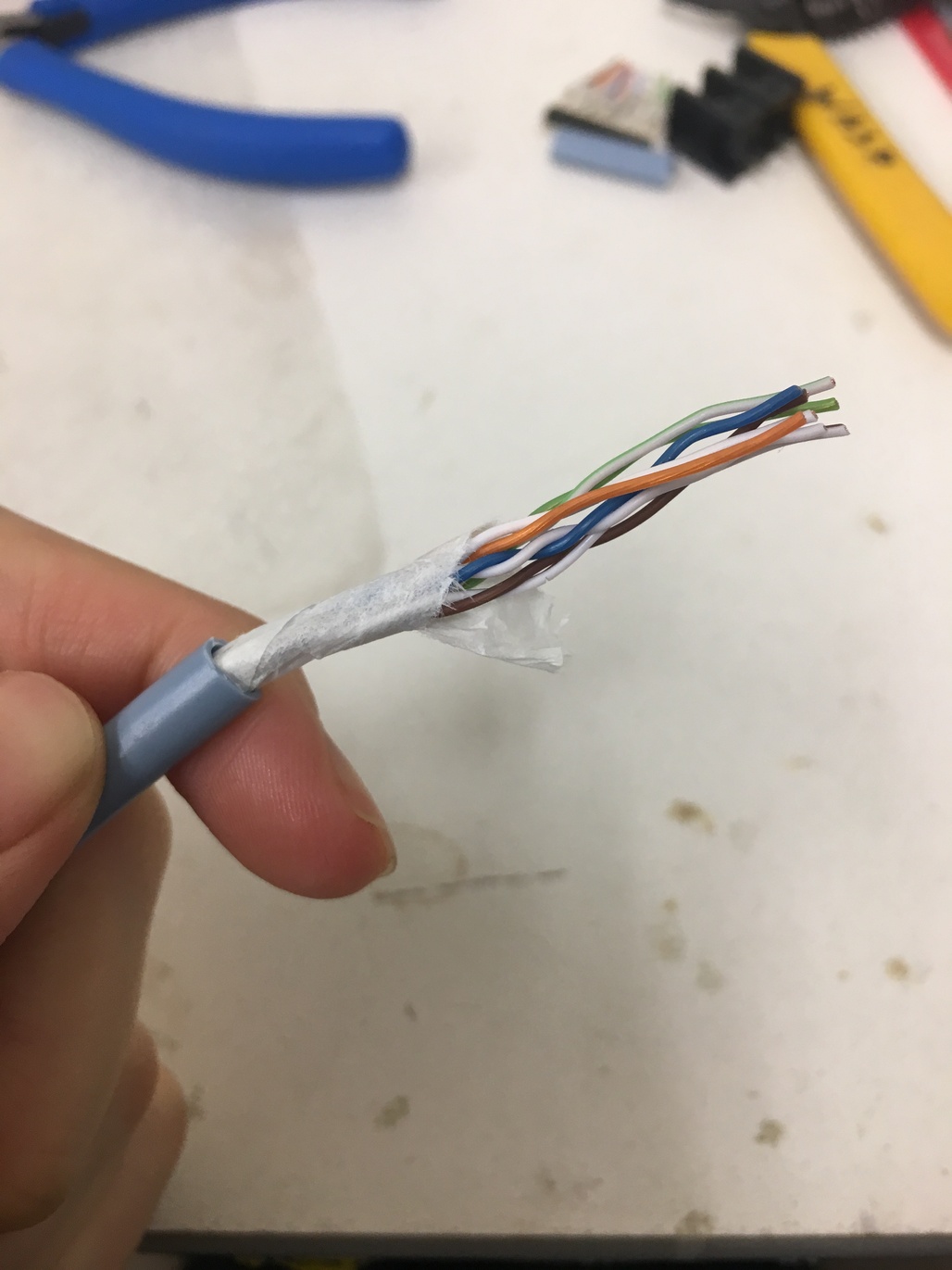
ビニールをとった状態。線にまとわりついている紙をとります。
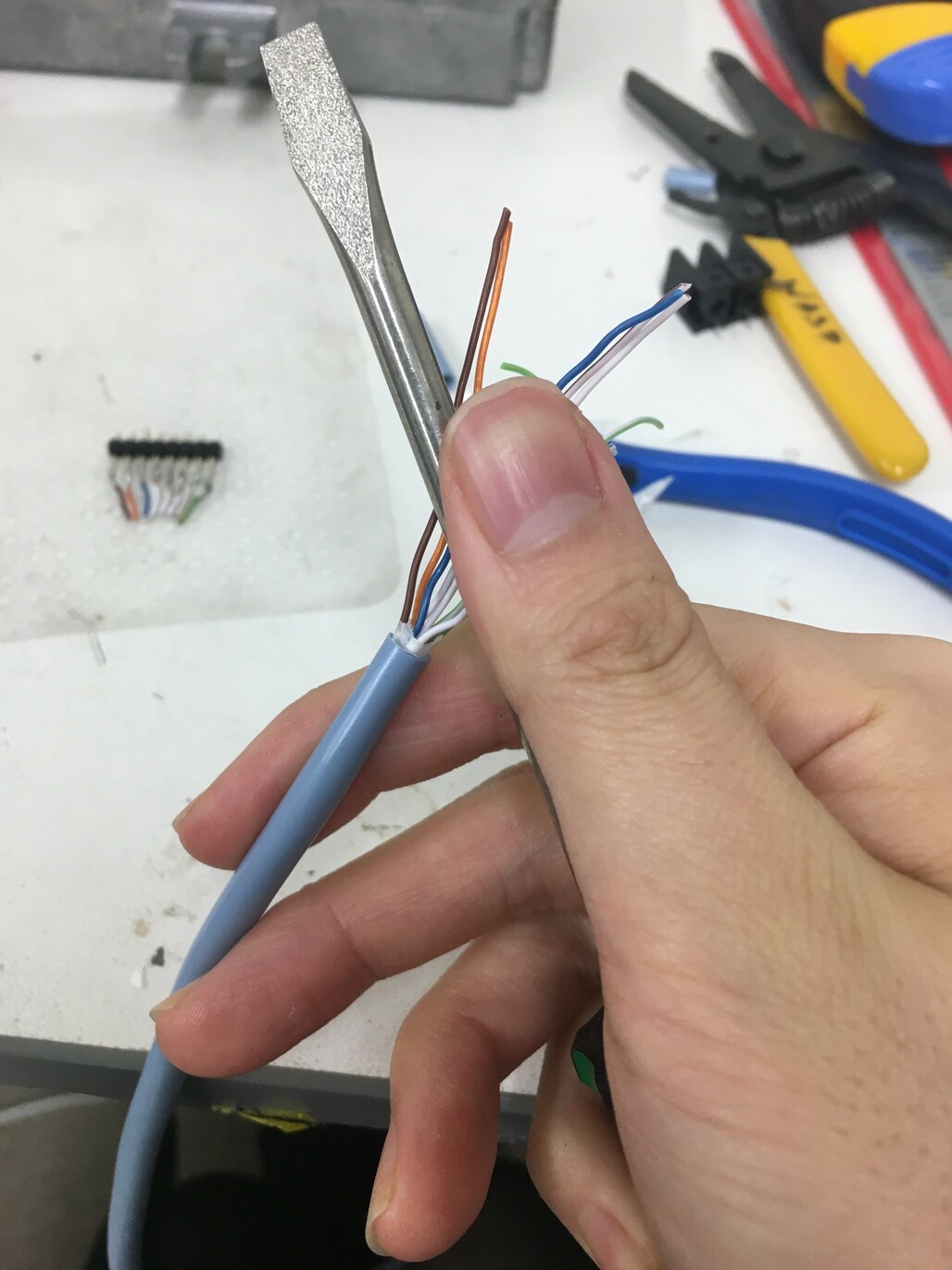
LANケーブルなので編みこまれていた分、グネグネしています。このままだとさらにはんだ付けするときに大変なので、線をまっすぐに直します。
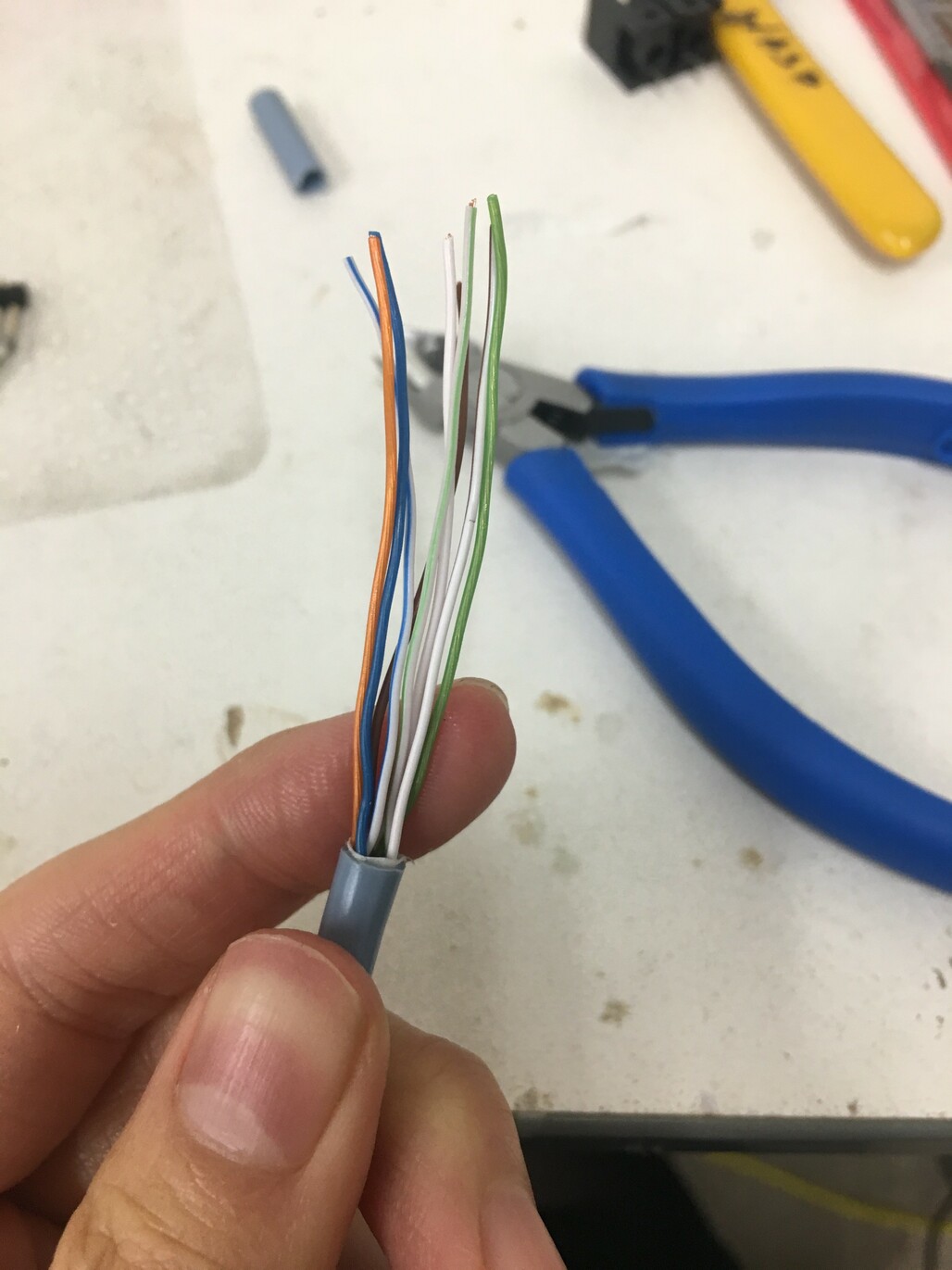
まあまあ、まっすぐになった。
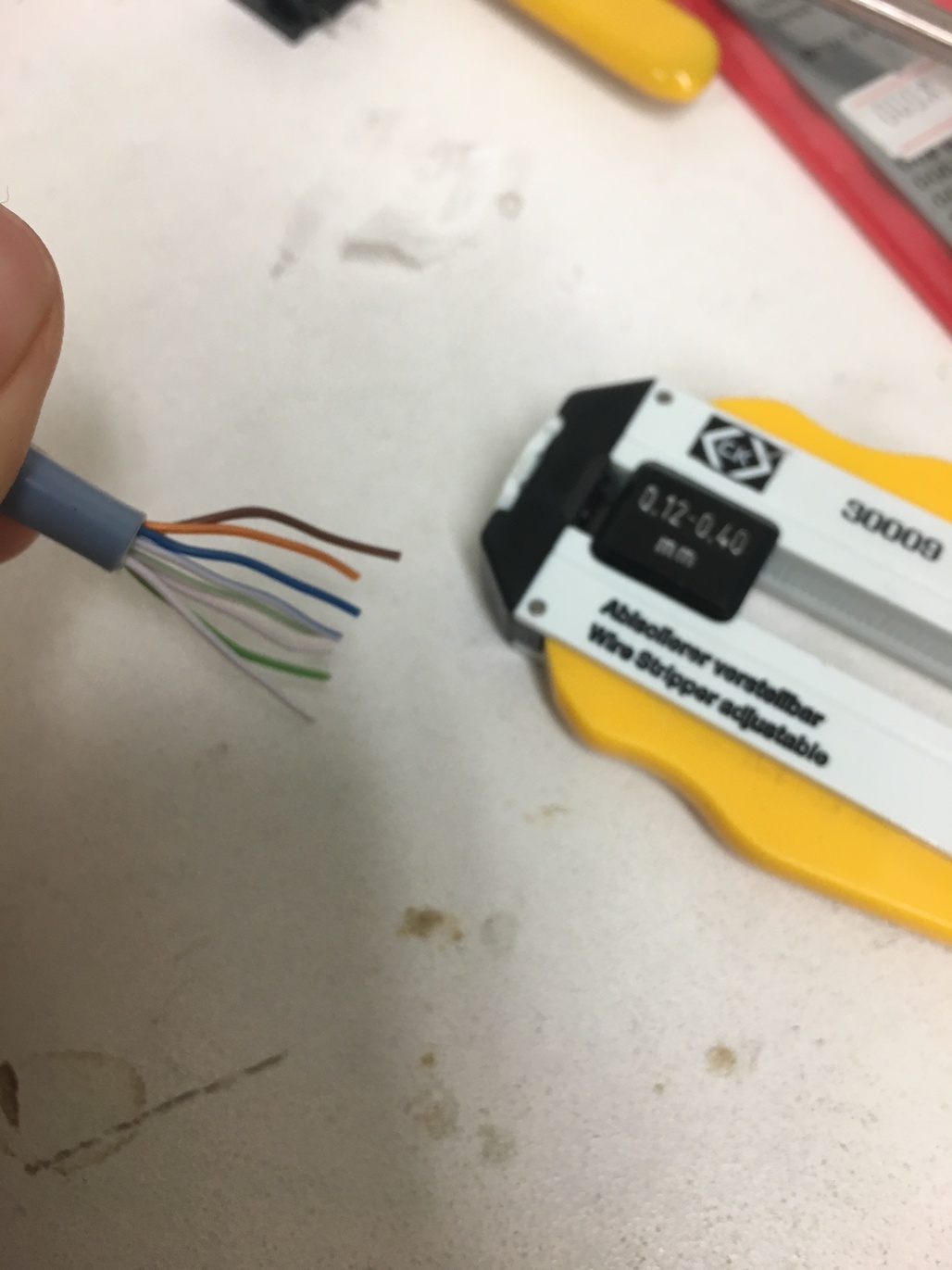
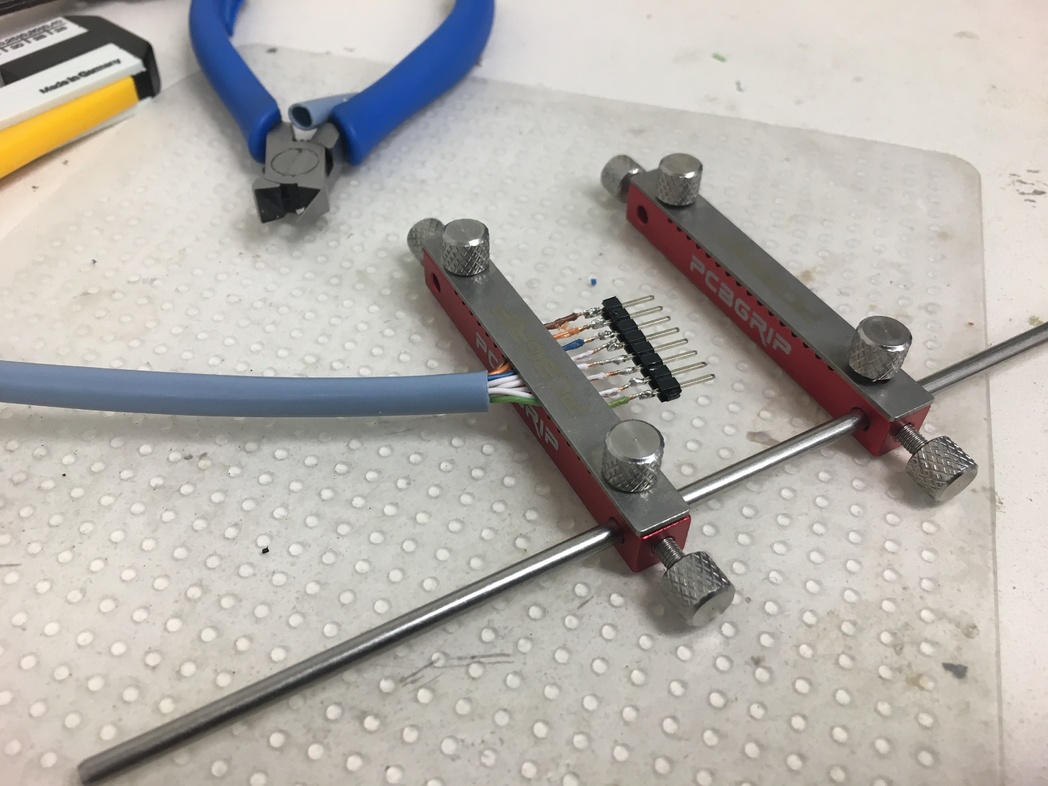
ピンヘッダに接続したときに、それぞれの線の長さが適切になるように整えてから、適度な長さでカットします。今回はLANケーブルの太さよりピンヘッダの幅の方が広く、これらを繋ぐときには真ん中に接続する線より端っこに接続する線の方が長めにしておくとはんだ付けしやすく、完成もきれいになりました。
線をワイヤストリッパなどのカッターで剥きます。
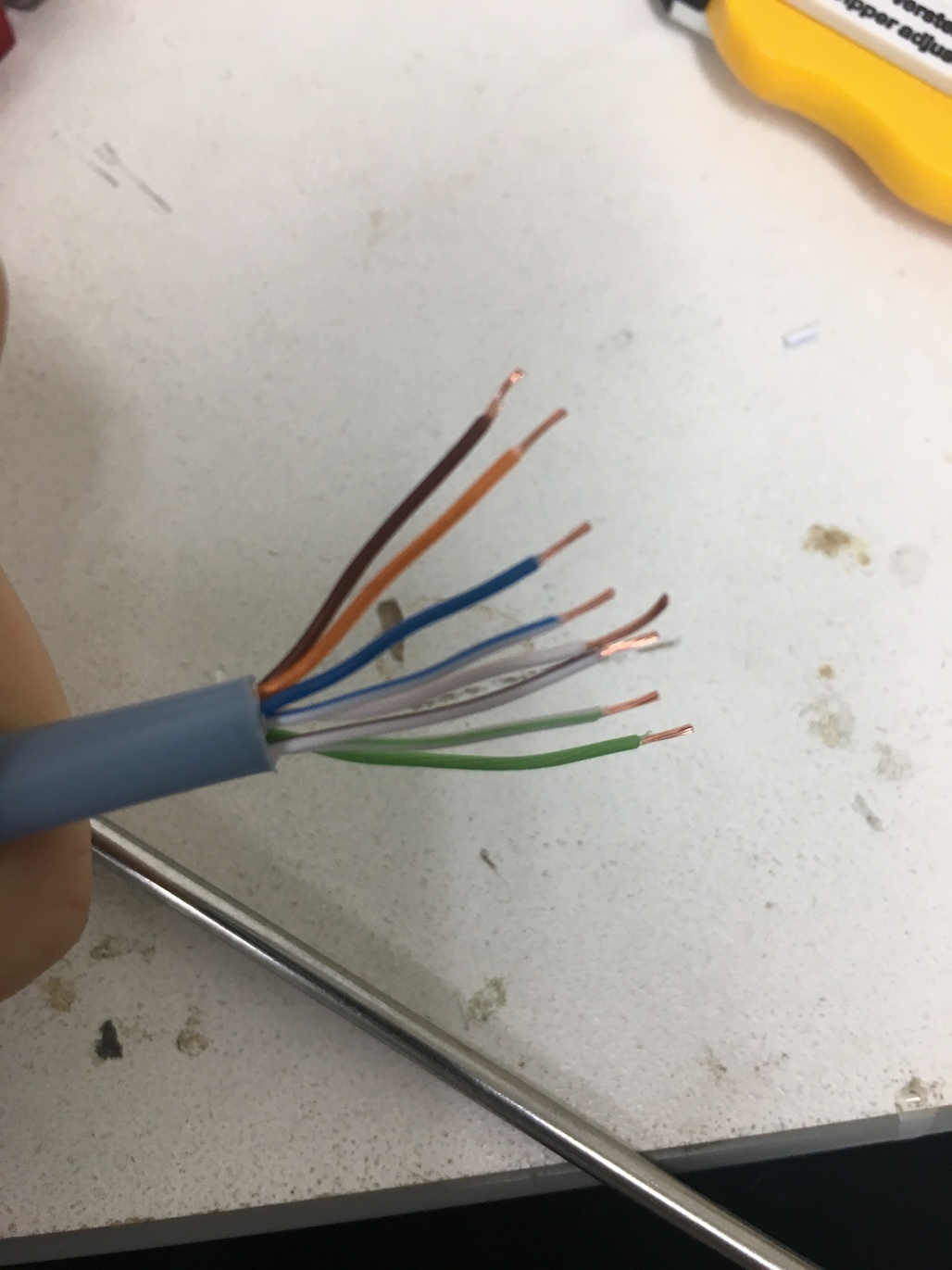
剥いた状態
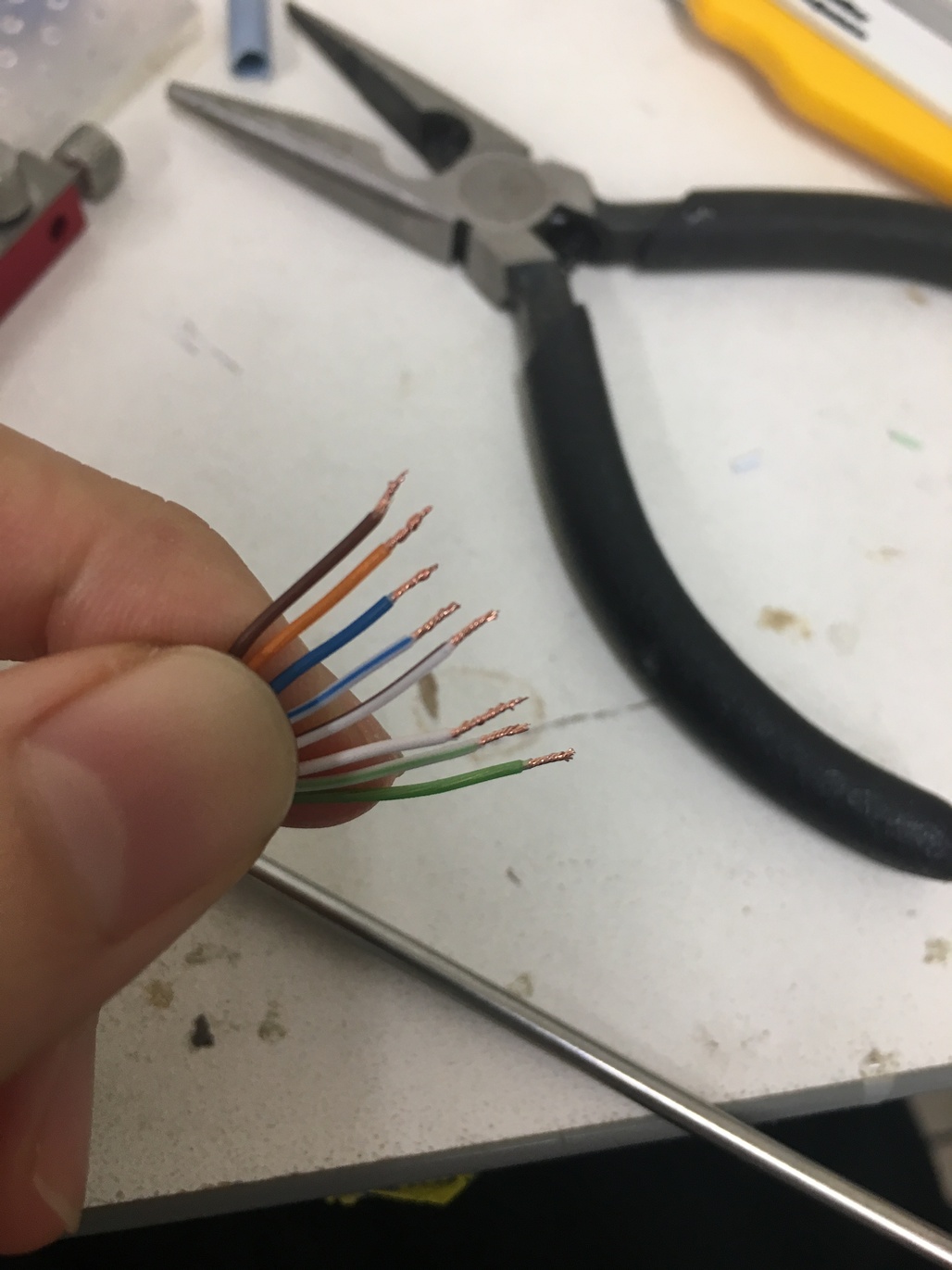
LANケーブルの各線はさらに細い線が集まってできているため、そのままだと何かあるとすぐばらけて面倒なので各線をねじって軽くまとめておきます。
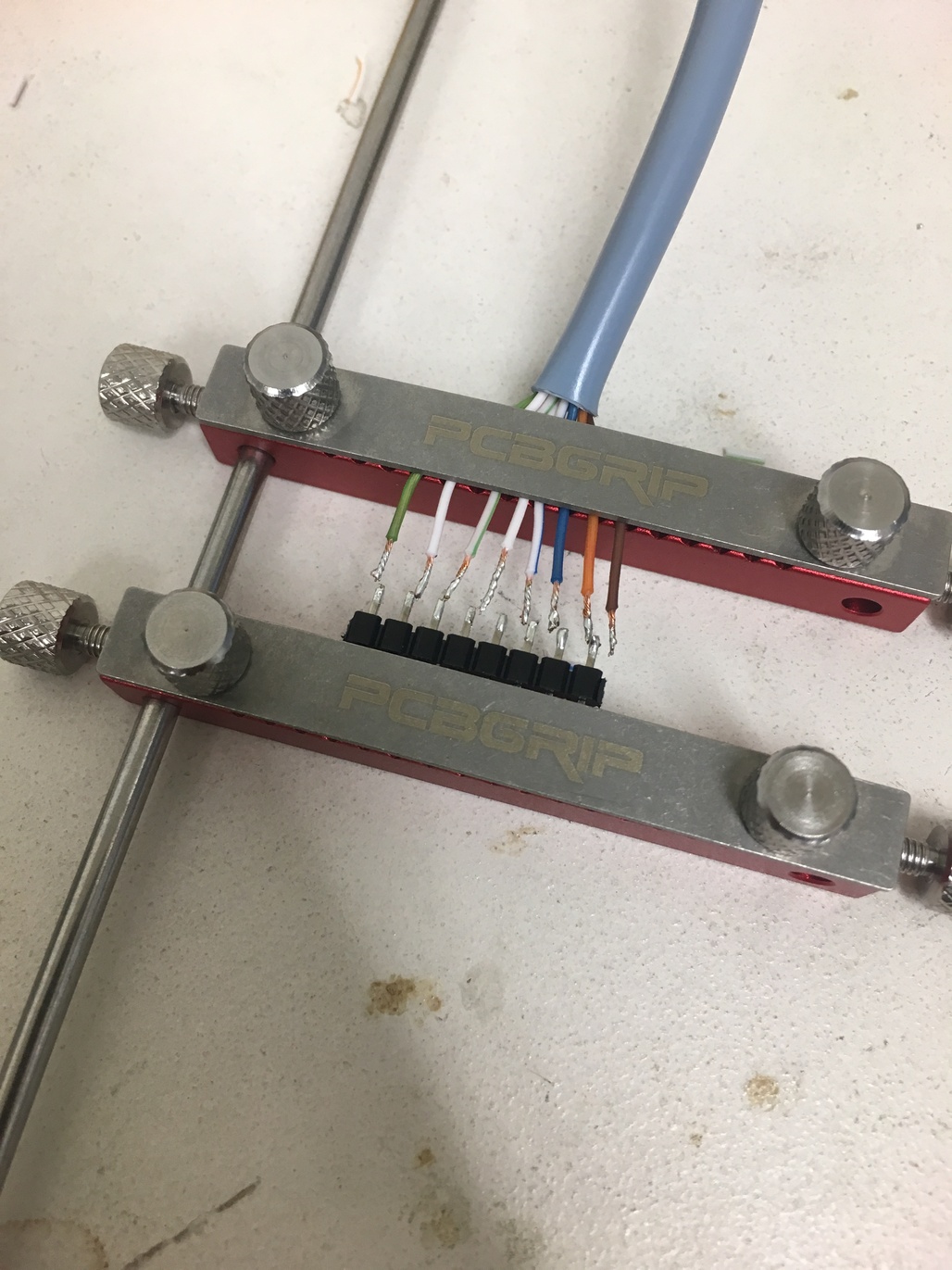
PCGGRIPさんに助けてもらって各線がじっとしているようにセットします。
各線とピンヘッダに予備はんだを付けます。
各線とピンヘッダを適切な距離に合わせてはんだ付けして出来上がりです。
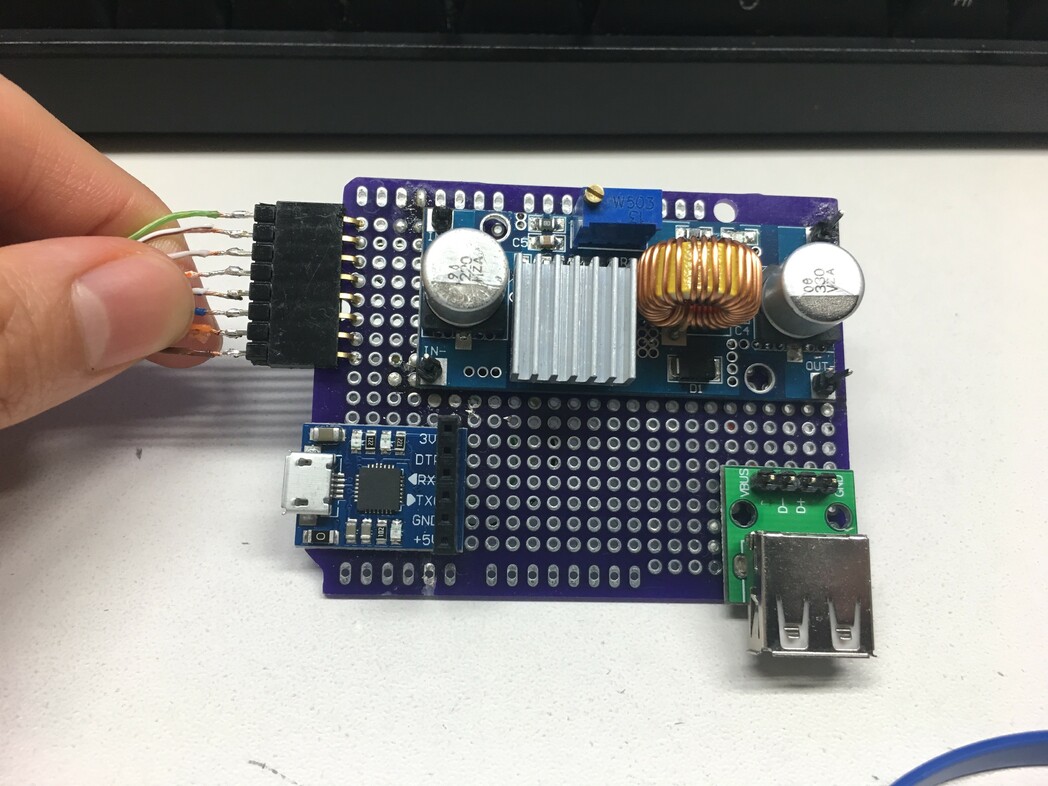
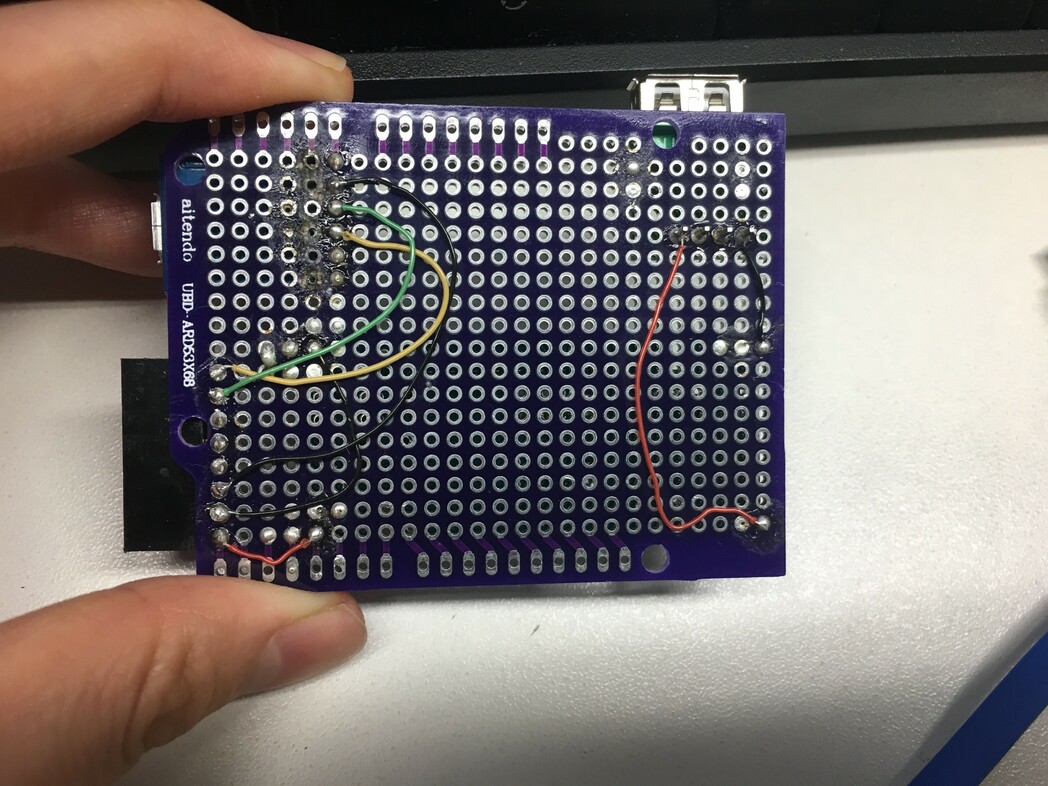
次に、これまでに使用したシリアルUSB変換アダプタ、降圧モジュール、に加えDINプラグからの接続用にソケット、raspbery pi の電源用のUSBコネクタをまとめてはんだ付けします。
DINプラグから出ているピンヘッダを指す向きだけ決めて、「raspberrypiからルンバを操作する(2)」「raspberrypiからルンバを操作する(3)」で繋いだ時と同じ対応付けで配線します。
写真ではピンヘッダの指す向きを間違えてショートしたことにより壊れた部品を付け替えた部分が荒れています。何気なくつなぐと間違える恐れがあるので、指す向きがわかるようにピンヘッダに印をつけておくと良いと思います。
使用したUSBコネクタです。このUSBからはデータのやり取りはしないので、GNDとVBUSだけ降圧モジュールのOUT側につなぎます。
DIP化USBコネクタ [UAF-D1]
ここまでうまくできたら、DINプラグ側のピンヘッダの向きに注意して、ルンバ、raspberry pi、各部品を繋ぎます。
さらにraspberry piが起動できたら、「raspberrypiからルンバを操作する(2)」のときと同じ要領で動かしてみます。
ここまでで、ジャンパーケーブルが抜ける心配をすることなくルンバが自由に動ける状態になりました。次はせっかくraspberry pi経由で操作できるようになったので、もう一工夫してみたいなと思います。あと、昔に比べればまだましにはなったけれど、はんだ付けはまだまだ下手くそなので時間を見つけて練習しないとなと思いました、がんばります。